Отладка постпроцессора и кинематической модели для робота Kuka KR90 R3100
По предварительной оценке, после отладки новой технологии, снижение трудоемкости операции по перфорации отверстий составит более чем в 2 раза.
Периодически мы будем публиковать короткие обзоры текущих проектов Clio-Soft.
И в этом блог-посте мы покажем выполнение тестовых работ на гибком производственном модуле Kuka KR90 R3100, оснащённым манипулятором и позиционером. Для этого робота наши специалисты разработали постпроцессор и кинематическую модель. Проект реализован в программном обеспечении NX 12.
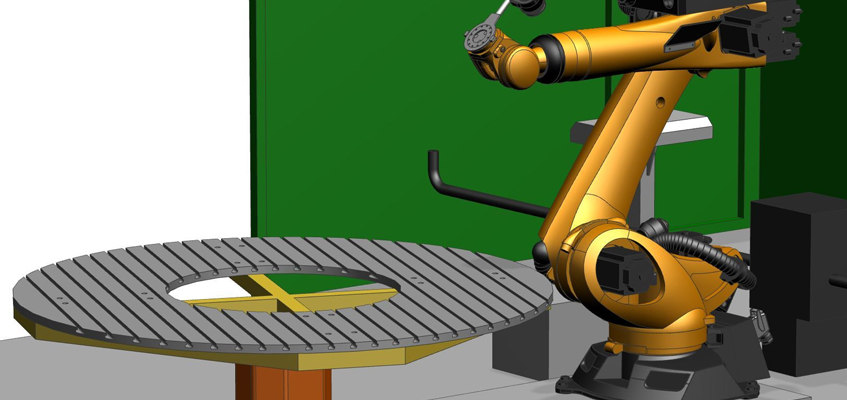
Заказчик планирует использование промышленного робота в паре с поворотным столом, установленным на дискретном позиционере. Данное оснащение смоделировано в виртуальной модели, которую Вы можете посмотреть на скриншотах >>>
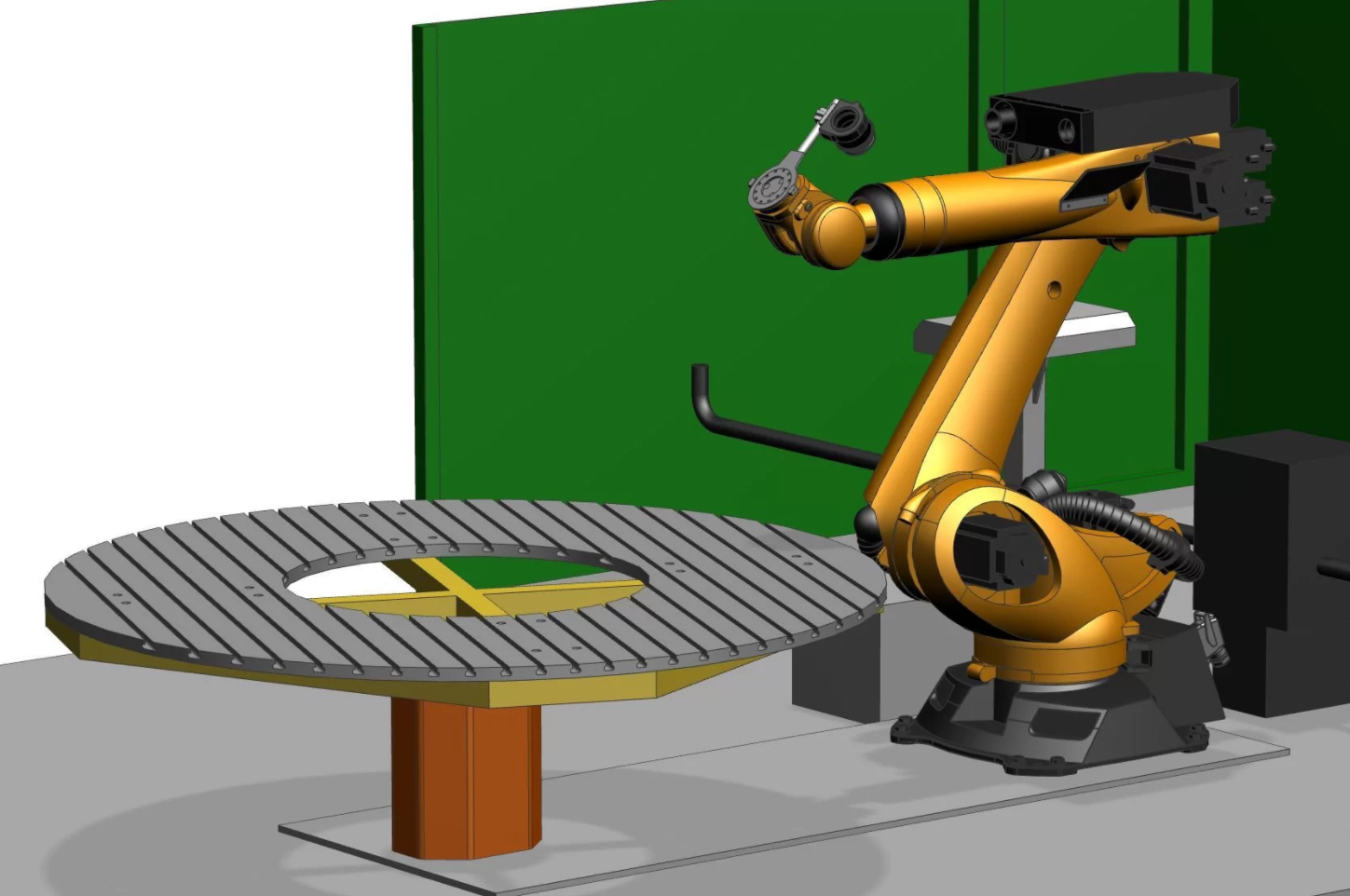
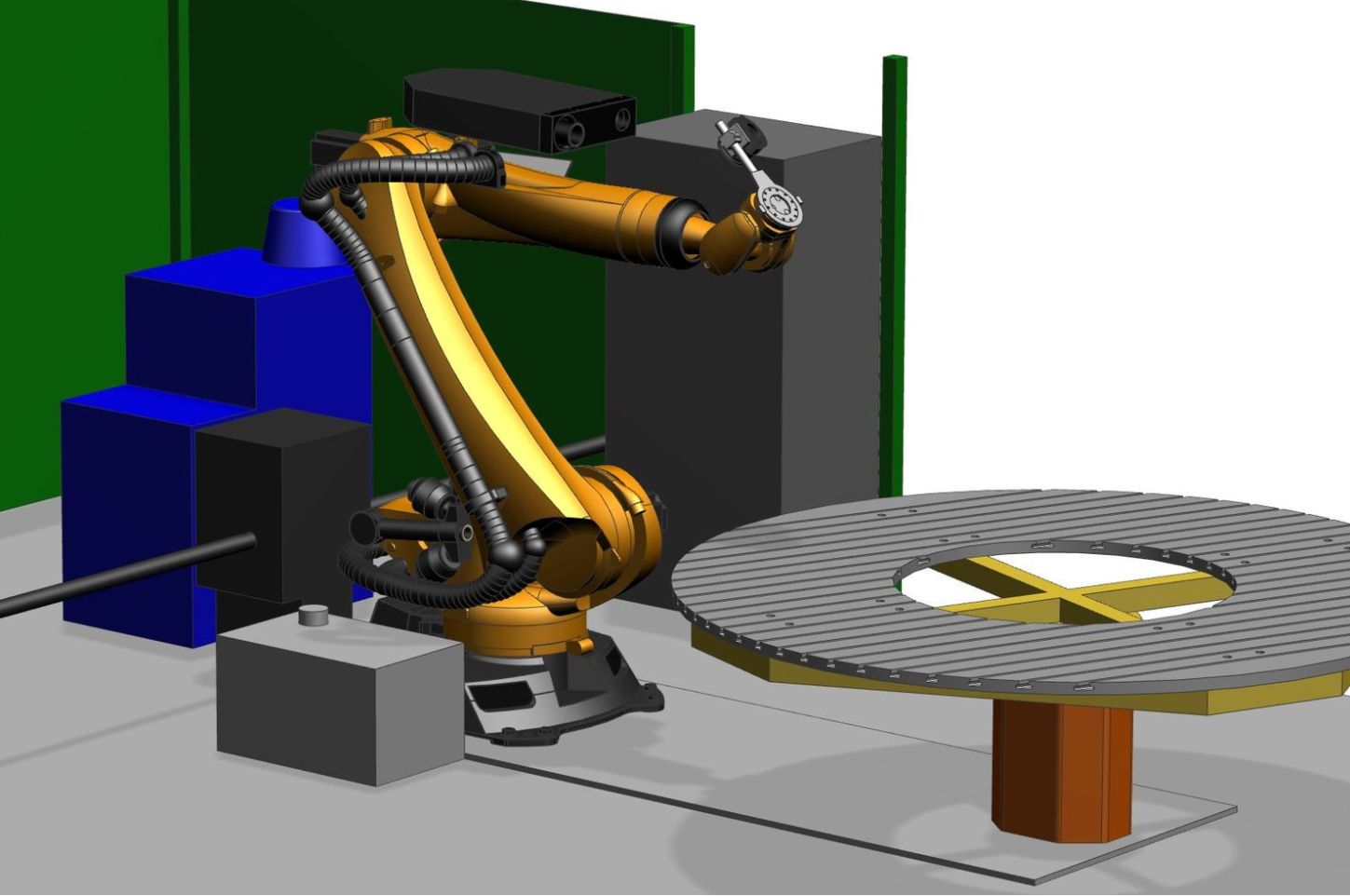
Виртуальная (кинематическая) модель робота Kuka KR90 R3100
В дальнейшем Заказчик будет использовать данную производственную ячейку для перфорации 160 тысяч отверстий малого диаметра в крупногабаритной детали из композитного материала.


На фото справа деталь из композитного материала, на которой производилась отработка робота Kuka KR90 R3100
В настоящее время данная операция выполняется слесарями Заказчика вручную по шаблонам и имеет значительную трудоемкость.